
進口程序準備中,近期開放購買。
注意:目前價格僅供參考。
機器人手指傳感器


原名
Robotic Finger Sensor
貨號
SPX-14200
特價
1,714
資料來源:https://www.sparkfun.com/products/14200
Does your robot crush objects with its hulkishly strong grip? Give your robotic hand or claw a better sense of touch with the Robotic Finger Sensor.
The Robotic Finger Sensor (RFS) uses a unique combination of infrared distance sensing, optical encapsulant and data filtering to detect extremely light touches. Additionally, the silicon covering is squishy, giving the sensor increased grip (friction) and a qualitative sense of force; the sensor can’t output a quantitative number like 2.7 lbs of force, but it does output an increasing IR value indicating additional compression of the encapsulant.
How does it work? In short, IR light from the VCNL4040 distance sensor dramatically scatters when an object like a white coffee cup or human skin comes in contact with the face of the sensor. The example firmware demonstrates how to capture this signal and turn it into ‘Touch’ and ‘Release’ events.
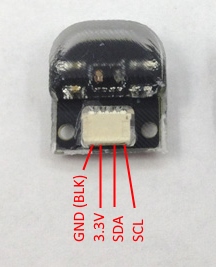
The RFS requires 3.3V and communicates over I2C. The connector is compatible with our Qwiic system. The Qwiic system enables fast and solderless connection between popular platforms and various sensors and actuators. You can read more about the Qwiic system here. We carry 200mm, 100mm, 50mm, and breadboard friendly Qwiic cables.
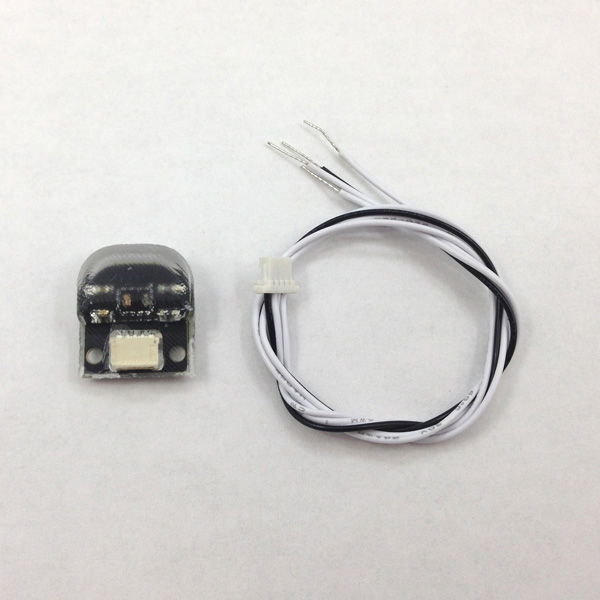
Orders placed after April 3rd, 2017 include a complimentary breadboard friendly Qwiic cable. Additionally, this product includes an 8" cable that is terminated in bare 28AWG wires (it’s our 4-Pin JST product). The board has two small 2-56 screw holes for mounting. Hot glue also works well.
This is a collaboration with Professor Nikolaus Correll at CU Boulder. A portion of this sale is given back to Dr. Correll’s lab for the continued development of innovative robotic components.
The Robotic Finger Sensor is the first piece of autonomous robotic control. To see what’s possible when you couple vision systems with touch capability, have a look at full-stack autonomous manipulation using this sensor with ROS. CU is working on an impressive robotic perception stack to make this easier for the beginner.
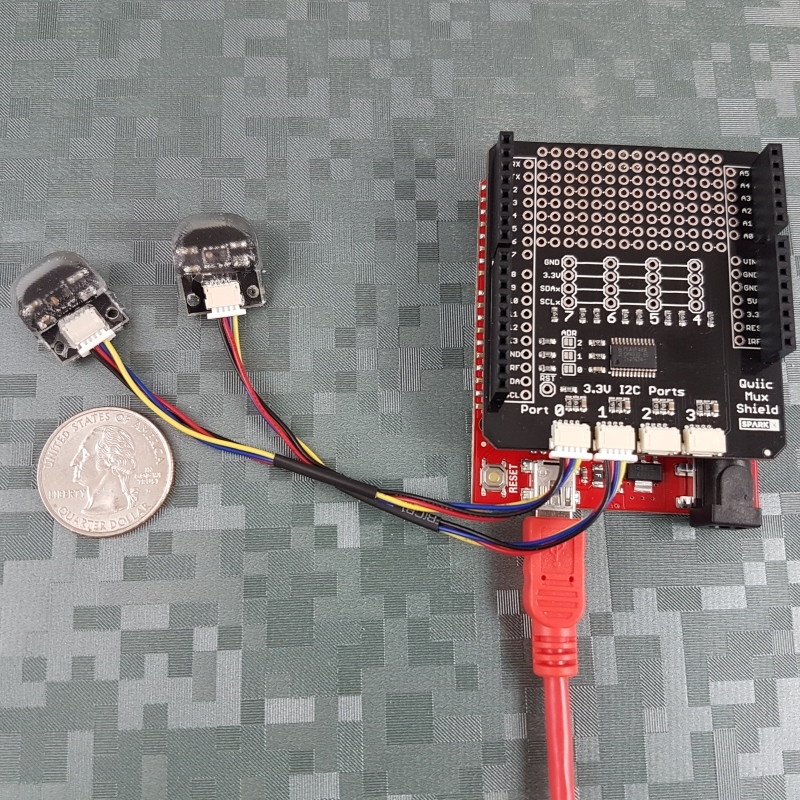
What if I need more than one? The sensor has only one I2C address so putting multiple on the bus will cause collisions. Luckily, we’ve got a mux for that! The Qwiic Mux allows up to 4 sensors to be simultaneously connected with the ability to daisychain up to 8 muxes. 32 fingers is a big gripper! Control examples are available here.
We do not plan to regularly carry SparkX products so get them while they’re hot!
Experimental Product: SparkX products are rapidly produced to bring you the most cutting edge technology as it becomes available. These products are tested but come with no guarantees. Live technical support is not available for SparkX products. Head on over to our forum for support or to ask a question.
Weight: 1.6g
Includes:
- Robotic Finger Sensor
- 8" 4-Pin JST cable with bare wire termination
Features:
- 16x18x8mm
Documents:
- Schematic
- Pinout
- Arduino Examples to get you started quickly
- VCNL4040 IR Sensor Datasheet
- Github repo
- Robotic Materials Product Page
- Original Mold via Onshape
Videos
請問您的機器人暗戀以其hulkishly強大的抓地力對象?給你的機器人手或爪觸摸感更好用機器人手指傳感器。
機器人手指傳感器(RFS)使用紅外線距離感測,光學密封劑和數據過濾的一個獨特的組合,以檢測非常輕的觸摸。此外,該矽覆蓋物是糊狀的,給予傳感器增加把手(摩擦)和力定性的意義;傳感器不能輸出數定量等的力2.7磅,但它確實輸出表示密封劑的額外的壓縮增加的IR值。
它是如何工作的?總之,從VCNL4040距離傳感器的IR光時象白色咖啡杯或人類皮膚的物體與所述傳感器的接觸面急劇散射。示例中的固件演示如何捕捉到了這個信號,並把它變成“觸摸”和“釋放”事件。
的RFS需要3.3V和連通過I 2 C.它包括以裸線端的一個8“電纜(這是我們的4針JST產物 ),這些導線是28AWG和太薄可靠地插入到一個模擬板,我們知道這太臭,我們正在上得到一個更好的電纜的工作。從目前來看,我們建議終止與較粗的電線跳線或您自己的22AWG線。該板有兩個小2-56螺絲孔,用於安裝。熱膠也適用好。
這是教授合作尼古拉斯·科雷爾在CU博爾德。此次出售的一部分返還給科雷爾博士的實驗室進行的創新型機器人部件的持續發展。
機器人手指傳感器是第一塊自主機器人控制的。要了解什麼是可能的,當你的情侶視覺系統與觸摸功能,看看全棧的自主操作使用該傳感器具有ROS 。 CU正在一個令人印象深刻的機器人感知堆棧 ,使這個更容易為初學者。
羽毛檢測的示範
我們不打算定期開展SparkX產品因此得到他們,而他們是熱的!
外形尺寸:16x18x8mm
重量:1.6g
包括:
- 機器人手指傳感器
- 8“裸導線端接4針JST電纜
文件:
- 概要
- 引腳
- Arduino的例子 ,讓你快速入門
- VCNL4040紅外傳感器數據表
- GitHub庫
- 機器人材料產品頁
- 通過Onshape原模











{kind=link}