官方授權台灣代理分銷
UWB PK-1000標準版









原名
UWB PK-1000 Standard Edition
貨號
113990396
分類
Tracker
特價
31,185
暫無庫存
SeeedStudio 目前暫時無庫存,因為該公司無法提供確切恢復供貨時間,為了避免延宕或出貨爭議,恕不提供下單代訂服務。
資料來源:https://www.seeedstudio.com/UWB-PK-1000-Standard-Edition-p-2918.html
Description
PK-1000 is a cm-level accurate positioning / distance measuring kit with independent intellectual property rights. It is featured with a scheduling system based on clock synchronization. This in-house developed scheduling system, combined with traditional UWB positioning technology, has enabled PK-1000 with the ability to solve the biggest problem in usual TOA (time of arrive) based UWB positioning method -- poorly configurable mesh network. This deficiency means that global positioning in a large complex environment cannot be achieved by usual UWB, while with PK-1000, it is possible. PK-1000 is suitable for research, as well as for integrating with any third-party products. For more information about this kit, please download the Introduction in Detail, then you can follow the User Manual of PK-1000, set up the kit by yourself , and make further development.
Technical Details
| Weight | G.W 165g N.W 156.5g |
| Battery | Exclude |
Part List
| Figure2 PK-1000 anchor | 4 |
| Figure 1 PK-1000 tag | 1 |
| Antenna | 5 |
描述
1.硬件
PK-1000是具有自主知識產權的厘米級精確定位/距離測量套件。它具有基於時鐘同步的調度系統。這種內部開發的調度系統,結合傳統的UWB定位技術,使得PK-1000能夠解決通常基於UWB定位方法的TOA(到達時間)的最大問題 - 配置不良的網狀網絡。這種缺陷意味著通過UWB無法實現在復雜環境中的全球定位,而使用PK-1000,這是可能的。 PK-1000適用於研究,以及與任何第三方產品的集成。按照PK-1000的規範和手冊 ,您可以自行設置套件,利用它或進一步開發它。
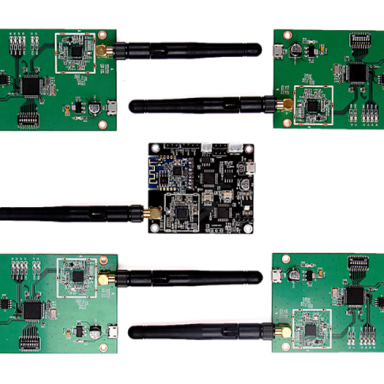
1.1產品圖片

1.2硬件組件
1.2.1標籤

如圖3所示,PK-100標籤的硬件系統包括5個部分:
MCU獲取由TAG測量的距離數據,計算TAG的絕對坐標,並通過串行端口,CAN端口和TCP端口處理與外部處理器交換的數據。
TAG與IR-UWB芯片通信,控制IR-UWB的工作模式,並與範圍內的錨點進行通信。
TCP服務器,串行和CAN接口傳輸數據並無線接收命令。
SWD和ISP是代碼升級的接口。
TAG通過微型USB或獨立的5V直流插座供電。
1.2.2錨

如圖4所示,PK-100錨的硬件系統包括3部分:
MCU與IR-UWB芯片進行通信,控制IR-UWB的工作模式,並與範圍內的Tag進行通信。
可以用DIP開關設置錨定ID。詳細說明請參考PK-1000用戶手冊 。
錨點由5v微型USB驅動。
1.3接口定義
請查看 PK-1000用戶手冊 。
1.4硬件模塊的性能指標
Decawave提供的IR-UWB芯片具有以下數據速率:
沒有。 | 數據速率 | 前導長度 |
| 1 | 110Kbps | 3.042米 |
| 2 | 850Kbps | 380.3us |
| 3 | 6.8Mbps | 103.3us |
Decawave提供的IR-UWB芯片具有以下通道:
| 沒有。 | 中心頻率(MHz) | 帶寬(MHz) |
| 1 | 3494.4 | 499.2 |
| 2 | 3993.6 | 499.2 |
| 3 | 4492.8 | 499.2 |
| 4 | 3993.6 | 1331.2 |
| 五 | 6489.6 | 499.2 |
| 6 | 6489.6 | 1081.6 |
默認情況下,PK-1000套件在通道2上工作,中心頻率為3.994GHz,數據速率為6.8Mbps。
PK-10000傳輸的信號功率譜密度為-41Bm / MHz。帶寬為500MHz,PK-1000的信號功率為-14dBm,遠低於WIFI和藍牙。
PK-1000標籤和錨的平均功率約為0.925w。
1.5物理層規格
1.5.1Dimensions
PK-1000標籤和錨點上的所有四個定位孔的直徑為3.1mm。使用M3螺絲固定PK-1000。

1.5.2Operatingtemperaturerange
PK-1000的工作溫度範圍為-40℃〜+ 85℃, 性能由TCXO(TemperatureControlledCrystalOscillator)保證。
軟件
2.1微控制器的軟件
2.1.1距離測量
2.1.1.1距離測量的理論
PK-100測距距離理論為:
距離= Vl * Ttof
( V1是光速,Ttof是電磁波傳輸的持續時間)
為了抑制晶體振盪器偏差對Ttof的影響,PK-1000採用對稱雙向雙向測距(SDSTWR)方法,如圖7所示:

2.1.1.2測量系統
PK-1000支持3種不同的距離測量系統,所有這些系統均基於UWB TOF方法。您可以根據自己的應用場景選擇這些系統。
(1)1標籤,1anchor

(2)1標籤,Nanchors

(3)Mtag,Nanchors

PK-1000是基於內部開發的時鐘同步調度系統,其兼容硬件和軟件上述系統。但是,對於系統3(M個標籤,N個錨點),為了確保在所有標籤被測量時測量頻率保持在10Hz,我們建議您在同一系統中使用不超過10個標籤。錨的數量沒有限制。
注意:
時鐘同步調度系統是PK-1000的重要特徵。 PK-1000的優秀網絡功能屬於此功能。大型複雜空間的定位精度為20cm。
錨的數量沒有限制。這意味著隨機標籤可以與任何四個錨點進行通信,隨機標籤可以隨時選擇和更改與之通信的錨點。
2.1.2坐標計算
PK-1000的定位是指具有X,Y坐標的2D定位。
2.1.2.1計算理論

PK-1000定位系統只能運行3個錨點。第四個錨為用戶提供更多的距離數據,從而提高系統的準確性和魯棒性。
2.1.2.2計算結果
您可以在主機RLKit中找到結果。欲了解更多信息,請查看PK-1000用戶手冊 。
2.2主機軟件
2.2.1代碼升級
Pleaselookinto PK-1000用戶手冊 。
2.2.2RLKit
主機RLKit具有以下功能:
(1)設置PK-1000和RLKit之間的連接。
(2)設置標籤ID,對應的錨點ID和坐標。
(3)實時顯示標籤和錨點之間的距離以及計算出的標籤坐標。
請查看PK-1000用戶手冊了解更多信息。
2.3 PK-1000默認參數
200 200 200 200 200 -40 -40 200 200 -40 -40 -40 -40 -40 -40 -40 -40 -40 -40 200 X-
| 內容 | 默認值 |
| 渠道 | 頻道2, 中心頻率:3.994GHz, 帶寬:500MHz |
| 數據速率 | 6.8MHz |
| 測量頻率 | 為10Hz |
| PANID | DECA |
2.3.2 PK-1000標籤WIFI模塊的默認參數
| 內容 | 默認值 |
| 操作模式 | TCP服務器 |
| SSID | 貝拉 |
| 密碼 | 12345678 |
| IP地址 | 192.168.0.19 |
| 服務器端口 | 8080 |
2.3.3PK-1000tag串口的默認參數
| 內容 | 默認值 |
| 波特率 | 115200 |
| 數據位 | 8 |
| 停止位 | 1 |
| 檢查位 | 沒有 |
PK-1000性能演示
3.1戶外測量誤差(0-20m)

3.2室內測量波動性能
200的X- 200 200 200 X- 200 200 X- 200 200 X- 200 200 X-

(2)真值423cm

(3)真值179cm

注意:
PK-1000 UWB距離測量性能在室內和室外環境不同。這是室內多路徑效應引起的,室內測量誤差略大於戶外,穩定性差。但這種偏差不會對定位產生很大的影響。