官方授權台灣代理分銷
RPLIDAR A2 - 最薄 LIDAR












資料來源:https://www.seeedstudio.com/RPLIDAR-A2M8---The-Thinest-LIDAR-p-2687.html
Description
NOTE: It is recommended to use the upgraded version, RPLiDAR A2M8 Laser Scanner Dev Kit with Adapter Certification as your alternative choice.
The RPLIDAR A2 is the next generation low cost 360 degree 2D laser scanner (LIDAR) solution developed by SLAMTEC. It can take up to 4000 samples of laser ranging per second with high rotation speed. And equipped with SLAMTEC patented OPTMAG technology, it breakouts the life limitation of traditional LIDAR system so as to work stably for a long time.
The system can perform 2D 360-degree scan within a 6-meter range. The generated 2D point cloud data can be used in mapping, localization and object/environment modeling.
The typical scanning frequency of the RPLIDAR A2 is 10hz (600rpm). Under this condition, the resolution will be 0.9°. And the actual scanning frequency can be freely adjusted within the 5-15hz range according to the requirements of users.
The RPLIDAR A2 adopts the low cost laser triangulation measurement system developed by SLAMTEC, which makes the RPLIDAR A2 has excellent performance in all kinds of indoor environment and outdoor environment without direct sunlight exposure. Meanwhile, before leaving the factory, every RPLIDAR A2 has passed the strict testing to ensure the laser output power meet the standards of FDA Class I.
System connection
The RPLIDAR A2 consists of a range scanner core and the mechanical powering part which makes the core rotate at a high speed. When it functions normally, the scanner will rotate and scan clockwise. And users can get the range scan data via the communication interface of the RPLIDAR and control the start, stop and rotating speed of the rotate motor via PWM.
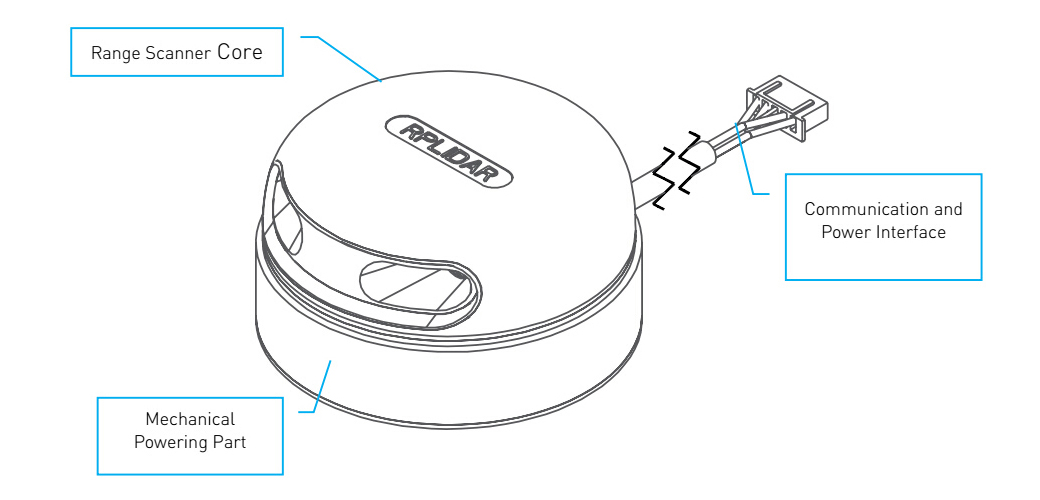
RPLIDAR System Composition
Introduction
The RPLIDAR A2 comes with a rotation speed detection and adaptive system. The system will adjust the angular resolution automatically according to the actual rotating speed. And there is no need to provide complicated power system for RPLIDAR. In this way, the simple power supply schema saves the BOM cost. If the actual speed of the RPLIDAR is required, the host system can get the related data via communication interface.
The detailed specification about power and communication interface can be found in the following sections.
Mechanism
The RPLIDAR A2 is based on laser triangulation ranging principle and adopts the high-speed vision acquisition and processing hardware developed by SLAMTEC.
The system ranges more than 4000 times per second.
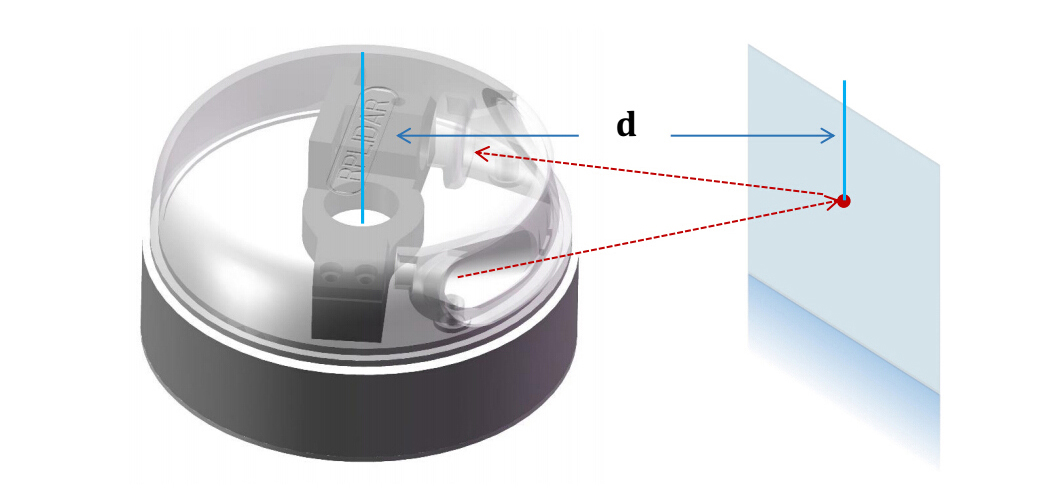
The RPLIDAR Working Schematic
During every ranging process, the RPLIDAR emits modulated infrared laser signal and the laser signal is then reflected by the object to be detected. The returning signal is then sampled by vision acquisition system in RPLIDAR and the DSP embedded in RPLIDAR starts processing the sample data and outputs distance value and angle value between object and RPLIDAR via communication interface.
When drove by the motor system, the range scanner core will rotate clockwise and perform the 360-degree scan for the current environment.
Safety and Scope
The RPLIDAR A2 system uses a low power infrared laser as its light source, and drives it by usting modulated pulse. The laser emits light in a very short time frame which can ensure its safety to human and pet, and it reaches Class I laser safety standard.
The modulated laser can effectively avoid the interference from ambient light and sunlight during ranging scanning process, which makes RPLIDAR work excellent in all kinds of indoor environment and outdoor environment without sunlight.
Application Scenarios
The RPLIDAR can be used in the following application scenarios:
General robot navigation and localization
Environment scanning and 3D re-modeling
Service robot or industrial robot working for long hours
Home service /clean robot navigation and localization
General simultaneous localization and mapping (SLAM)
Smart toy's localization and obstacle avoidance
Measurement Performance
For Model A2M7/A2M8 Only
| Item | Unit | Min | Typical | Max | Comments |
| Distance Range | Meter(m) | 0.15 | - | 8 | based on white objects with 70% reflectivity |
| Angular Range | Degree | - | 0-360 | - | - |
| Distance Resolution | mm | - | <0.5 | - | <1.5 meters |
| <1% of the distance | All distance range* | ||||
| Angular Resolution | Degree | 0.45 | 0.9 | 1.35 | 10Hz scan rate |
| Sample Duration | Millisecond(ms ) | - | 0.25 | - | - |
| Sample Frequency | Hz | 2000 | 4000 | 4100 | |
| Scan Rate |
Hz |
5 | 10 | 15 | The rate is for a round of scan. The typical value is measured when RPLIDAR takes 400 samples per scan |
RPLIDAR Performance
Note: the triangulation range system resolution changes along with distance, and the theoretical resolution change of RPLIDAR is shown as below:
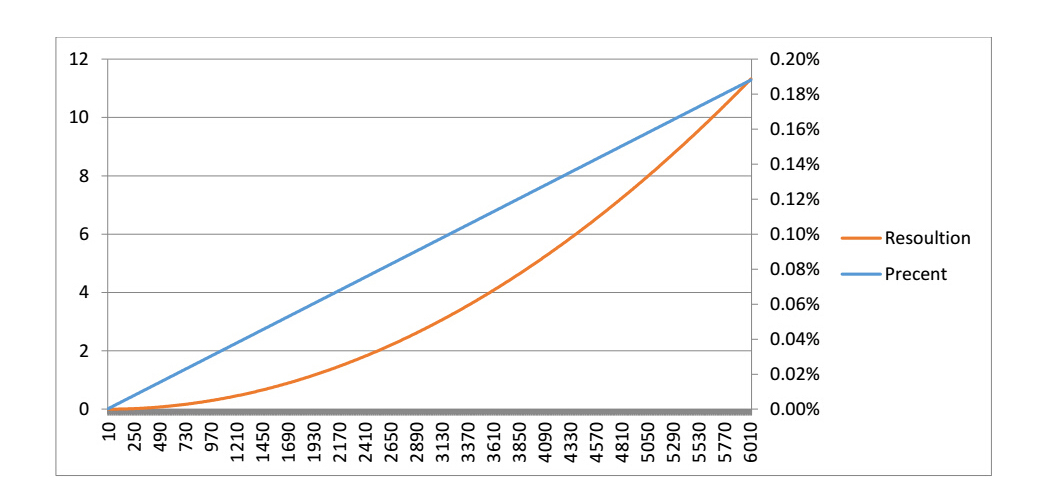
The Trend Graph of RPLIDAR Resolution
Laser Power Specification
For Model A2M7/A2M8 Only
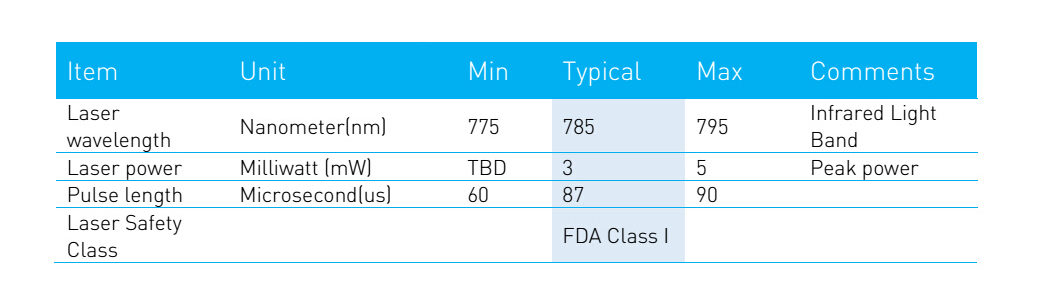
RPLIDAR Optical Specification
Communication Interface
The RPLIDAR A2 uses separate 5V DC power for powering the range scanner core and the motor system. And the standard RPLIDAR A2 uses XH2.54-5P male socket. Detailed interface definition is shown in the following figure:
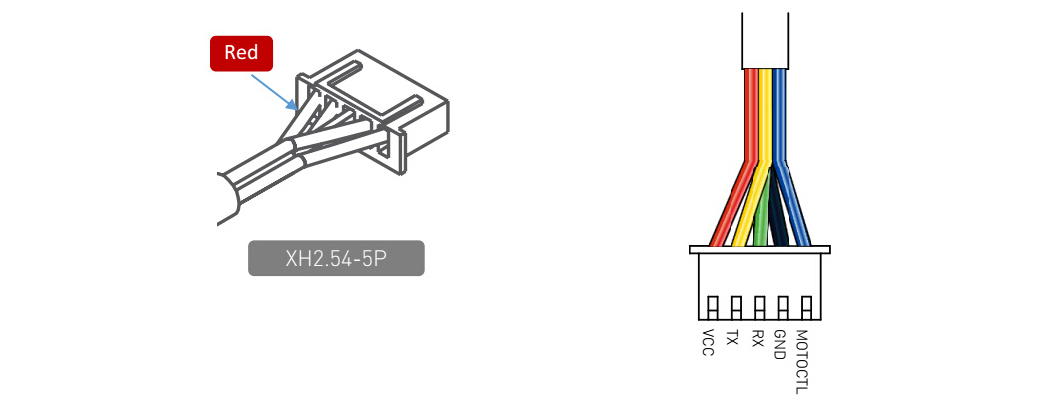
RPLIDAR Power Interface Definition
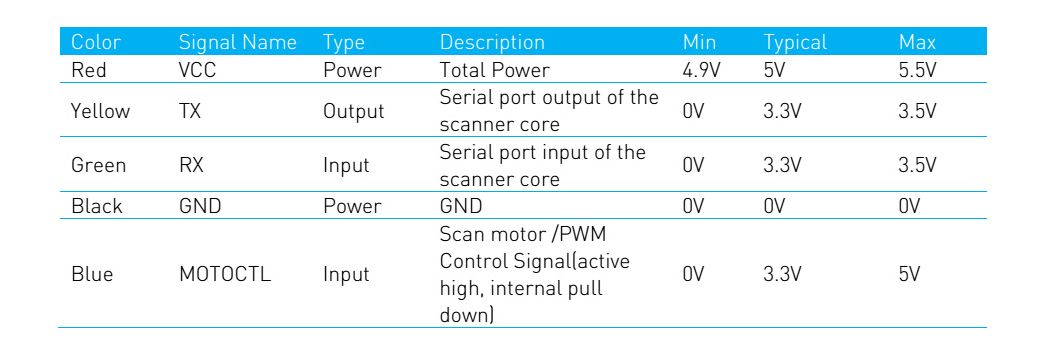
RPLIDAR External Interface Signal Definition
For Model A2M7/A2M8 Only
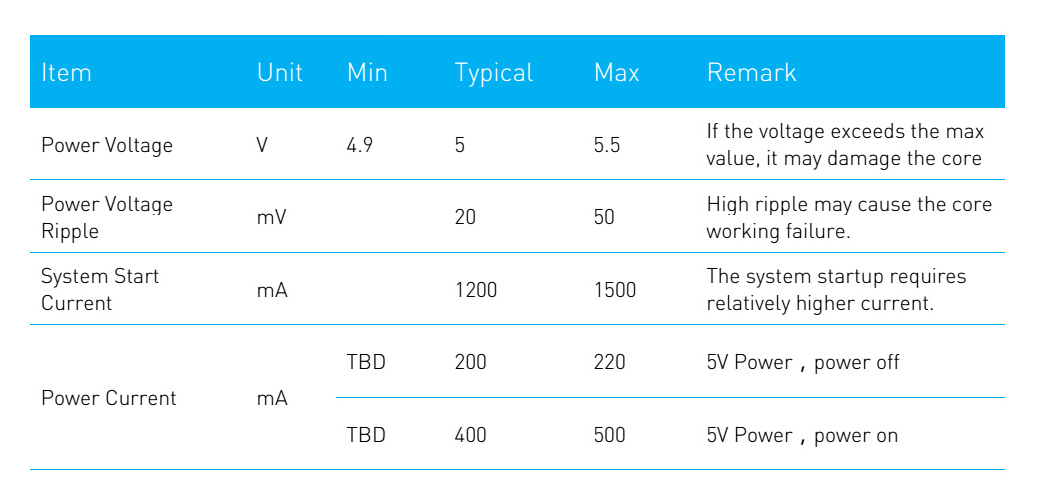
RPLIDAR Power Supply Specification
Data Communicaation Interface
The RPLIDAR A2 takes the 3.3V-TTL serial port (UART) as the communication interface. The table below shows the transmission speed and the protocol standard.

Tech Support
This product is designed by Slamtec, for technical support, please contact with them via support@slamtec.com
Technical Details
| Weight | G.W 325g |
| Battery | Exclude |
Part List
| RPLIDAR A2M8 | 1 |
| USB Adapter | 1 |
| USB Cable | 1 |
描述
該RPLIDAR A2是下一代低成本360度的二維激光掃描器(LIDAR)由SLAMTEC開發的解決方案。它可能需要長達激光4000樣本範圍每秒的高轉速。並配備了SLAMTEC專利OPTMAG技術,跌破傳統激光雷達系統的壽命限制,從而為長時間穩定工作。
該系統可在6米的範圍內執行2D 360度掃描。生成的二維點雲數據可以映射,定位和對象/環境建模中使用。
所述RPLIDAR A2的典型掃描頻率為10Hz(600轉)。在這種條件下,分辨率將是0.9°。和實際的掃描頻率可以自由地5-15hz範圍內,根據用戶的要求進行調整。
所述RPLIDAR A2採用由SLAMTEC開發低成本激光三角測量系統,這使得RPLIDAR A2在各種室內環境和室外環境的優異的性能,而無需直接陽光照射。同時,在出廠前,每RPLIDAR A2已通過嚴格的測試,以確保激光器輸出功率符合FDA一類的標準
系統連接
所述RPLIDAR A2由一個範圍掃描器芯和機械供電部使所述芯旋轉以高速的。當它正常功能,掃描儀將旋轉和順時針方向進行掃描。用戶可以通過RPLIDAR的通信接口獲取的範圍內掃描數據和控制啟動,停止,並通過PWM旋轉電機的旋轉速度。
RPLIDAR系統組成
介紹
該RPLIDAR A2配有轉速檢測和自適應系統。系統將根據實際的轉速自動調整角分辨率。而且沒有必要為RPLIDAR提供複雜電力系統。以這種方式,簡單的電源模式節省材料成本。如果需要RPLIDAR的實際速度,主機系統可以通過通信接口獲取相關的數據。
關於功率和通信接口的詳細說明可以在以下章節找到。
機制
該RPLIDAR A2是基於激光三角測距原理,採用高速視覺採集和處理硬件由SLAMTEC開發的。
該系統範圍超過每秒4000次。
該RPLIDAR工作示意圖
期間每測距過程中,RPLIDAR發射調製的紅外激光信號,然後將激光信號被反射通過要檢測的對象。返回信號然後由視覺採集系統在RPLIDAR採樣並嵌入RPLIDAR在DSP開始處理的採樣數據,並輸出距離值和經由通信接口對象和RPLIDAR之間角度值。
當由電動機系統推動,範圍掃描器芯將順時針旋轉,並執行360度掃描當前的環境。
安全範圍
該RPLIDAR A2系統採用低功率紅外激光器作為光源,並通過usting調製脈衝驅動它。激光器發射在非常短的時間框架,其可保證其安全性對人類和寵物的光,它達到I類激光安全標準。
該調製的激光可以有效的避免範圍掃描過程,這使得RPLIDAR工作優秀各種室內環境和室外環境中沒有陽光時環境光線和陽光的干擾。
應用場景
該RPLIDAR可在下列應用場景中使用:
-
•Ÿ一般機器人的導航和定位
-
•Ÿ環境掃描和3D重新建模
-
•Ÿ服務機器人或工業機器人長時間工作
-
•Ÿ主頁服務/清潔機器人的導航和定位
-
•Ÿ通用同步定位與地圖(SLAM)
-
•Ÿ智能玩具的定位與避障
測量性能
•Ÿ對於型號A2M3 / A2M4只

RPLIDAR性能
注:三角測量範圍系統分辨率與距離一起變化,RPLIDAR的理論分辨率變化如下圖所示:
RPLIDAR決議的趨勢圖
激光功率規格
•Ÿ對於型號A2M3 / A2M4只
RPLIDAR光學參數
通訊接口
所述RPLIDAR A2使用單獨的5V直流電源的範圍掃描器芯和電機系統供電。和標準RPLIDAR A2採用XH2.54-5P男性插座。詳細的接口定義顯示在如下圖所示:
RPLIDAR電源接口定義
RPLIDAR外部接口信號定義
•Ÿ對於型號A2M3 / A2M4只
RPLIDAR電源規格
數據Communicaation接口
該RPLIDAR A2取3.7V-TTL串口(UART)作為通信接口。下表顯示了傳輸速度和協議標準。
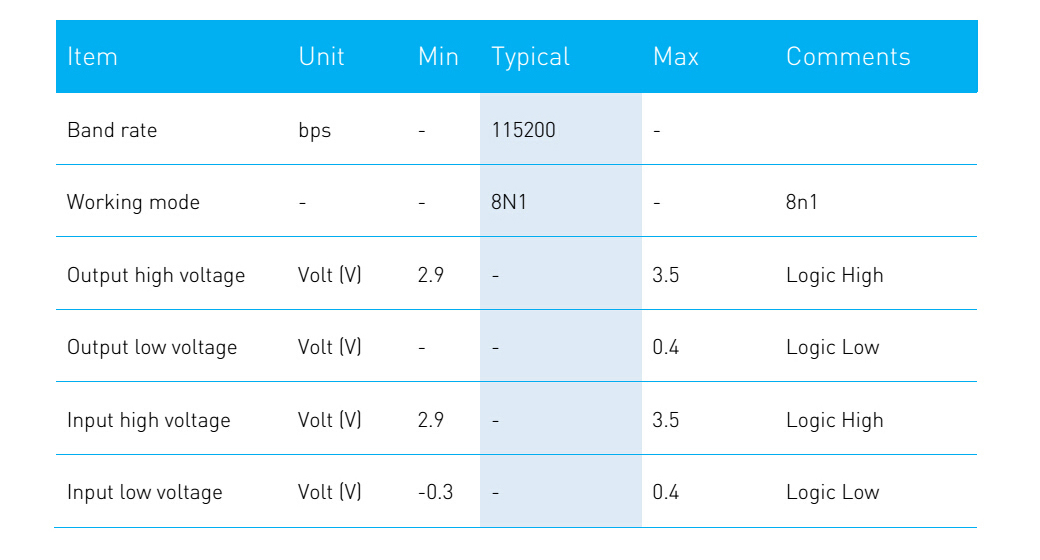
RPLIDAR串行端口接口規格
零件清單
-
•Ÿ1個RPLIDAR A2
-
•Y 1個USB適配器
資源
•Ÿ3D模型(RPLIDAR A2M4-R1開發工具包)
•ŸSDK(RPLIDAR版本:v1.5.4發布在:2016年6月2日)
-
•Ÿ 下載
•Ÿ應用筆記(ROS包裝說明:您仍然需要RPLIDAR SDK來使用這個包)
-
•Ÿ GitHub的信息庫
•Ÿ文件